На волне цифровизации и автоматизации инкрементальные поворотные энкодеры играют ключевую роль. В этой статье мы рассмотрим принципы, типы и реальные сценарии применения инкрементальных энкодеров, чтобы помочь вам лучше понять эту важную технологию.

Оглавление
Что такое инкрементный поворотный энкодер?
Инкрементальные поворотные энкодеры это датчики, которые могут преобразовывать скорость вращения, направление движения и перемещение вращающихся или линейно движущихся объектов в импульсные сигналы, которые можно передавать и хранить.
Принцип работы инкрементального поворотного энкодера
Принцип работы инкрементального энкодера заключается в подсчете принятого сигнала оптической или магнитной головки обнаружения в соответствии с полосами или зазорами на диске, таким образом измеряя расстояние и направление вращения или перемещения. При вращении диска энкодера оптическая детекторная головка будет генерировать импульсные сигналы по мере перемещения полос или зазоров. Каждый импульс представляет собой определенный угол поворота диска энкодера. Инкрементные энкодеры обычно имеют два выходных сигнала, а именно сигналы A-фазы и B-фазы. Путем подсчета сигналов A-фазы и B-фазы и измерения разности фаз можно рассчитать угол поворота или расстояние линейного перемещения измеряемого объекта.
Типы инкрементальных поворотных энкодеров
По принципу работы различают 3 типа инкрементальных поворотных энкодеров - магнитные, оптические и механические. Ниже приведены описания каждого типа:
Инкрементальный магнитный поворотный энкодер

Магнитный инкрементальный энкодер: Магнитный инкрементальный энкодер использует магнитные силовые линии для генерации импульсных сигналов. На вращающемся колесе энкодера попеременные изменения силовых линий магнитного поля регистрируются и преобразуются в импульсные сигналы.
По сравнению с традиционными инкрементальными оптическими энкодерами, инкрементальные магнитные энкодеры не требуют кодового диска и источника света, имеют меньше компонентов и более простую структуру обнаружения; в то же время сам элемент Холла также имеет множество преимуществ, таких как: прочная структура, малые размеры, небольшой вес, длительный срок службы, устойчивость к вибрациям, не боится загрязнения или коррозии от пыли, масла, водяного пара, соляного тумана и т.д.
Инкрементальный оптический поворотный энкодер
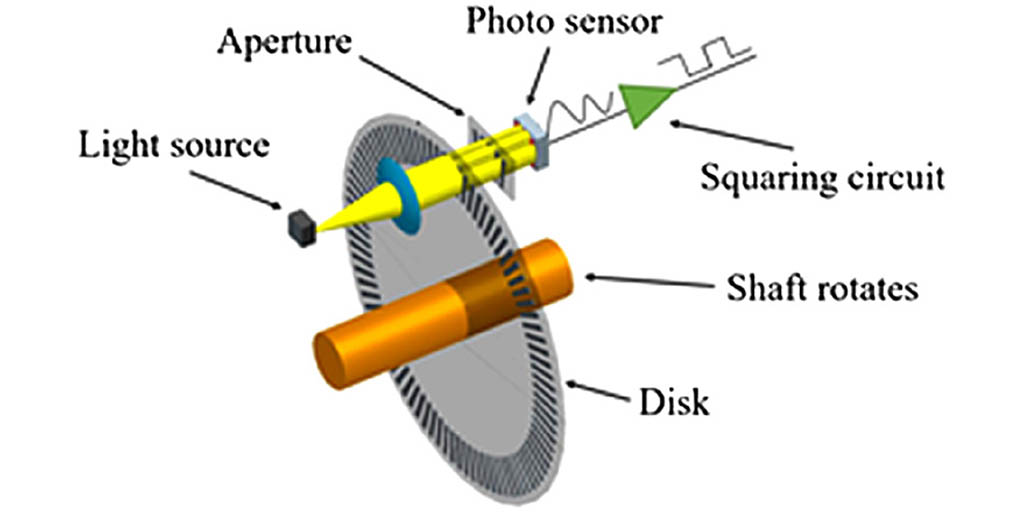
Оптический инкрементальный энкодер: Этот энкодер использует оптические принципы для генерирования импульсных сигналов. Свет проходит через решетку на вращающемся колесе энкодера, создавая чередующиеся светлые и темные участки, тем самым генерируя импульсный сигнал.
Инкрементальный механический поворотный энкодер
Механический инкрементальный энкодер: Механический инкрементальный энкодер использует механические контакты для генерации импульсных сигналов. При вращении корпуса энкодера контактные площадки скользят по металлическому проводящему листу, генерируя тем самым импульсный сигнал.
Инкрементальный поворотный энкодер arduino код
Инкрементальный поворотный энкодер ABZ имеет три канала: A, B и Z (также известный как индексный канал). Каналы A и B используются для определения положения и направления, как и в стандартном энкодере AB. Канал Z обеспечивает один импульс за оборот и часто используется для определения "исходного" или "нулевого" положения.
Вот простой фрагмент кода Arduino для чтения инкрементального поворотного энкодера ABZ:
// Определите подключение контактов энкодера и начальные значения
const int encoderPinA = 2;
// Подключается к контакту канала A на энкодере
const int encoderPinB = 3;
// Подключается к контакту канала B на энкодере
const int encoderPinZ = 4; // Подключен к контакту канала Z на энкодере (индекс)
volatile int encoderPos = 0; // Счетчик положения
int lastReportedPos = 0; // Последнее сообщенное положение
int aState;
int aLastState;
void setup() {
// Настройка последовательного монитора
Serial.begin(9600);
// Настройка выводов энкодера как входов
pinMode(encoderPinA, INPUT_PULLUP);
pinMode(encoderPinB, INPUT_PULLUP);
pinMode(encoderPinZ, INPUT_PULLUP);
// Считывание начального состояния энкодераPinA
aLastState = digitalRead(encoderPinA);
// Прикрепите прерывания
attachInterrupt(digitalPinToInterrupt(encoderPinA), readEncoder, CHANGE);
attachInterrupt(digitalPinToInterrupt(encoderPinZ), resetEncoder, RISING);
}
void loop() {
// Проверьте, не изменилась ли позиция с момента последнего сообщения.
если (lastReportedPos != encoderPos) {
Serial.print("Позиция: ");
Serial.println(encoderPos);
lastReportedPos = encoderPos;
}
}
// Функция прерывания для чтения каналов энкодера A и B
void readEncoder() {
aState = digitalRead(encoderPinA); // Считывает "текущее" состояние encoderPinA
// Если предыдущее и текущее состояние энкодераPinA отличаются, это означает, что произошел импульс
если (aState != aLastState) {
// Если состояние канала B отличается от состояния канала A, это означает, что энкодер вращается по часовой стрелке
если (digitalRead(encoderPinB) != aState) {
encoderPos++;
} else {
encoderPos-;
}
Serial.print("Позиция = ");
Serial.println(encoderPos);
}
aLastState = aState; // Обновление предыдущего состояния кодера текущим состоянием
}
// Функция прерывания для чтения канала Z энкодера (индекс)
void resetEncoder() {
encoderPos = 0; // Сброс позиции энкодера на ноль
Serial.println("Индекс обнаружен, позиция обнулена");
}
Как использовать этот код для Arduino
- Подключите каналы A, B и Z инкрементального поворотного энкодера ABZ к контактам 2, 3 и 4 на Arduino соответственно.
- Загрузите код в ваш Arduino.
- Откройте монитор последовательного интерфейса для просмотра положения энкодера и сброса индексов
Инкрементный и абсолютный поворотный энкодер
Существует 14 различий между инкрементальным и абсолютным поворотным энкодером, в приведенных ниже таблицах показаны все различия между ними:
Области применения инкрементальных энкодеров
Автоматизированные производственные линии: В автоматизированных производственных линиях инкрементальные энкодеры используются для измерения и контроля положения машин. Например, на сборочной линии энкодеры позволяют точно контролировать положение компонентов для обеспечения правильной сборки.
Робототехника: Инкрементные энкодеры играют важную роль в робототехнике, обеспечивая точную обратную связь, благодаря которой роботы могут точно управлять своими движениями.
Управление серводвигателем: Серводвигатели требуют точной обратной связи по положению для точного управления. Инкрементные энкодеры являются ключевым компонентом для обеспечения такой обратной связи,
Заключение
Инкрементальные энкодеры являются важной частью современных промышленных систем и систем автоматизации. Глубокое понимание принципов, типов и областей применения инкрементальных энкодеров позволяет лучше понять их важную роль в различных сценариях промышленной автоматизации. Несмотря на наличие некоторых проблем, с постоянным развитием технологий у нас есть основания полагать, что в будущем инкрементальные энкодеры будут играть все большую роль и способствовать прогрессу в области промышленной автоматизации. Надеемся, что эта статья помогла вам глубже понять суть инкрементальных энкодеров и пробудила ваш интерес к этой важной технологии.