Na fali cyfryzacji i automatyzacji przyrostowe enkodery obrotowe odgrywają kluczową rolę. W tym artykule zagłębimy się w zasady, typy i rzeczywiste scenariusze zastosowań enkoderów inkrementalnych, aby pomóc lepiej zrozumieć tę ważną technologię.

Spis treści
Czym jest przyrostowy enkoder obrotowy?
Przyrostowe enkodery obrotowe to czujniki, które mogą konwertować prędkość obrotową, kierunek ruchu i przemieszczenie obracających się lub poruszających się liniowo obiektów na sygnały impulsowe, które mogą być przesyłane i przechowywane.
Zasada działania przyrostowego enkodera obrotowego
Zasada działania enkodera inkrementalnego polega na zliczaniu odebranego sygnału optycznej lub magnetycznej głowicy detekcyjnej zgodnie z paskami lub przerwami na dysku, mierząc w ten sposób odległość i kierunek obrotu lub przemieszczenia. Gdy dysk enkodera obraca się, optyczna głowica detekcyjna generuje sygnały impulsowe w miarę przesuwania się pasków lub szczelin. Każdy impuls reprezentuje określony kąt obrotu tarczy enkodera. Enkodery inkrementalne mają zazwyczaj dwa sygnały wyjściowe, a mianowicie sygnały fazy A i fazy B. Zliczając sygnały fazy A i fazy B oraz mierząc różnicę faz, można obliczyć kąt obrotu lub odległość przemieszczenia liniowego mierzonego obiektu.
Typy przyrostowych enkoderów obrotowych
Zgodnie z różnicami w zasadzie działania, istnieją 3 typy inkrementalnych enkoderów obrotowych, są to enkoder magnetyczny, optyczny i mechaniczny. Poniżej znajdują się opisy każdego z nich:
Inkrementalny magnetyczny enkoder obrotowy

Magnetyczny enkoder inkrementalny: Magnetyczny enkoder inkrementalny wykorzystuje linie sił magnetycznych do generowania sygnałów impulsowych. Na obracającym się kole enkodera naprzemienne zmiany linii pola magnetycznego są wykrywane i przekształcane w sygnały impulsowe.
W porównaniu z tradycyjnymi inkrementalnymi enkoderami optycznymi, inkrementalne enkodery magnetyczne nie wymagają dysku kodowego i źródła światła, mają mniej komponentów i prostszą strukturę wykrywania; jednocześnie sam element halla ma również wiele zalet, takich jak: solidna konstrukcja, mały rozmiar, niewielka waga, długa żywotność, odporność na wibracje i nie boi się zanieczyszczenia lub korozji spowodowanej kurzem, olejem, parą wodną, mgłą solną itp.
Inkrementalny optyczny enkoder obrotowy
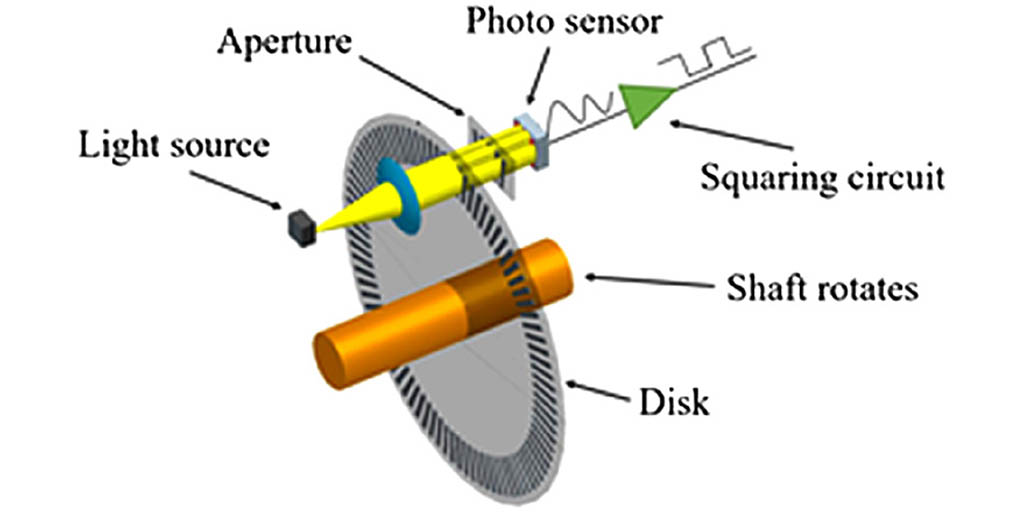
Optyczny enkoder inkrementalny: Enkoder ten wykorzystuje zasady optyczne do generowania sygnałów impulsowych. Światło przechodzi przez siatkę na obracającym się kole enkodera, tworząc naprzemiennie jasne i ciemne obszary, generując w ten sposób sygnał impulsowy.
Inkrementalny mechaniczny enkoder obrotowy
Mechaniczny enkoder przyrostowy: Mechaniczny enkoder inkrementalny wykorzystuje styk mechaniczny do generowania sygnałów impulsowych. Gdy korpus enkodera obraca się, punkty styku przesuwają się po metalowej blasze przewodzącej, generując w ten sposób sygnał impulsowy.
Kod arduino przyrostowego enkodera obrotowego
Inkrementalny enkoder obrotowy ABZ udostępnia trzy kanały: A, B i Z (znany również jako kanał indeksowy). Kanały A i B służą do określania pozycji i kierunku, podobnie jak w standardowym enkoderze AB. Kanał Z zapewnia pojedynczy impuls na obrót i jest często używany do określania pozycji “wyjściowej” lub “zerowej”.
Oto prosty fragment kodu Arduino do odczytu przyrostowego enkodera obrotowego ABZ:
// Definiowanie połączeń pinów enkodera i wartości początkowych
const int encoderPinA = 2;
// Podłączony do pinu kanału A enkodera
const int encoderPinB = 3;
// Podłączony do pinu kanału B enkodera
const int encoderPinZ = 4; // Podłączony do pinu kanału Z enkodera (Indeks)
volatile int encoderPos = 0; // Licznik pozycji
int lastReportedPos = 0; // Ostatnia zgłoszona pozycja
int aState;
int aLastState;
void setup() {
// Konfiguracja monitora szeregowego
Serial.begin(9600);
// Skonfiguruj piny enkodera jako wejścia
pinMode(encoderPinA, INPUT_PULLUP);
pinMode(encoderPinB, INPUT_PULLUP);
pinMode(encoderPinZ, INPUT_PULLUP);
// Odczyt stanu początkowego enkoderaPinA
aLastState = digitalRead(encoderPinA);
// Dołącz przerwania
attachInterrupt(digitalPinToInterrupt(encoderPinA), readEncoder, CHANGE);
attachInterrupt(digitalPinToInterrupt(encoderPinZ), resetEncoder, RISING);
}
void loop() {
// Sprawdź, czy pozycja zmieniła się od ostatniego raportu
if (lastReportedPos != encoderPos) {
Serial.print(“Pozycja: “);
Serial.println(encoderPos);
lastReportedPos = encoderPos;
}
}
// Funkcja przerwania odczytu kanałów A i B enkodera
void readEncoder() {
aState = digitalRead(encoderPinA); // Odczytuje “aktualny” stan encoderPinA
// Jeśli poprzedni i bieżący stan enkoderaPinA są różne, oznacza to, że wystąpił impuls.
if (aState != aLastState) {
// Jeśli stan kanału B różni się od stanu kanału A, oznacza to, że enkoder obraca się zgodnie z ruchem wskazówek zegara.
if (digitalRead(encoderPinB) != aState) {
encoderPos++;
} else {
encoderPos-;
}
Serial.print(“Pozycja = “);
Serial.println(encoderPos);
}
aLastState = aState; // Aktualizuje poprzedni stan enkodera z bieżącym stanem.
}
// Funkcja przerwania odczytu kanału Z enkodera (Indeks)
void resetEncoder() {
encoderPos = 0; // Resetowanie pozycji enkodera do zera
Serial.println(“Wykryto indeks, zresetowano pozycję do zera”);
}
Jak używać tego kodu Arduino
- Podłącz kanały A, B i Z przyrostowego enkodera obrotowego ABZ odpowiednio do pinów 2, 3 i 4 w Arduino.
- Prześlij kod do swojego Arduino.
- Otwórz Serial Monitor, aby wyświetlić pozycję enkodera i reset indeksu
Enkoder przyrostowy a absolutny enkoder obrotowy
Istnieje 14 różnic między enkoderem obrotowym inkrementalnym i absolutnym, a poniższe tabele przedstawiają wszystkie różnice między nimi:
Zastosowania enkoderów inkrementalnych
Zautomatyzowane linie produkcyjne: W zautomatyzowanych liniach produkcyjnych enkodery inkrementalne są wykorzystywane do pomiaru i kontroli pozycji maszyn. Na przykład na linii montażowej enkodery mogą precyzyjnie kontrolować położenie komponentów, aby zapewnić prawidłowy montaż.
Robotyka: Enkodery inkrementalne odgrywają ważną rolę w robotyce, zapewniając dokładne sprzężenie zwrotne ruchu, dzięki czemu roboty mogą precyzyjnie kontrolować własne ruchy.
Sterowanie serwomotorem: Serwomotory wymagają precyzyjnego sprzężenia zwrotnego dla precyzyjnego sterowania. Enkodery inkrementalne są kluczowym elementem zapewniającym takie sprzężenie zwrotne,
Wnioski
Enkodery inkrementalne są ważną częścią nowoczesnych aplikacji przemysłowych i automatyki. Dzięki dogłębnemu zrozumieniu zasad, typów i zastosowań enkoderów inkrementalnych możemy lepiej zrozumieć ich ważną rolę w różnych scenariuszach automatyki przemysłowej. Chociaż istnieją pewne wyzwania, wraz z ciągłym rozwojem technologii mamy powody, by wierzyć, że enkodery inkrementalne będą odgrywać większą rolę w przyszłości i promować postęp w dziedzinie automatyki przemysłowej. Mamy nadzieję, że ten artykuł pomógł ci lepiej zrozumieć enkodery inkrementalne i wzbudził twoje zainteresowanie tą ważną technologią.