في موجة الرقمنة والأتمتة، تلعب المشفرات الدوارة التزايدية دورًا محوريًا. سوف تتعمق هذه المقالة في مبادئ المشفرات التزايدية وأنواعها وسيناريوهات التطبيق الواقعية للمشفرات التزايدية لمساعدتك على فهم هذه التقنية المهمة بشكل أفضل.

جدول المحتويات
ما هو المشفر الدوار التزايدي؟
المشفرات الدوارة التزايدية هي مستشعرات يمكنها تحويل سرعة الدوران واتجاه الحركة وإزاحة الأجسام الدوارة أو المتحركة خطيًا إلى إشارات نبضية يمكن نقلها وتخزينها.
مبدأ عمل المشفر الدوراني التزايدي
مبدأ عمل أداة التشفير التزايدي هو حساب الإشارة المستقبلة لرأس الكشف البصري أو المغناطيسي وفقًا للخطوط أو الفجوات الموجودة على القرص، وبالتالي قياس المسافة واتجاه الدوران أو الإزاحة. عندما يدور قرص أداة التشفير، يولد رأس الكشف الضوئي إشارات نبضية مع تحرك الخطوط أو الفجوات. تمثل كل نبضة زاوية دوران معينة لقرص أداة التشفير. تحتوي أجهزة التشفير التزايدي عمومًا على إشارتي خرج، وهما إشارات الطور A والطور B. من خلال حساب إشارات الطور A والطور B وقياس فرق الطور، يمكن حساب زاوية الدوران أو مسافة الإزاحة الخطية للجسم المقيس.
أنواع المشفرات الدوارة التزايدية
وفقًا لاختلافات مبدأ العمل، هناك 3 أنواع من المشفرات الدوارة التزايدية، وهي المشفرات المغناطيسية والبصرية والميكانيكية. فيما يلي وصف لكل نوع منها:
مُشفِّر دوّار مغناطيسي تزايدي

مُشفِّر تزايدي مغناطيسي: يستخدم المشفر التزايدي المغناطيسي خطوط قوة مغناطيسية لتوليد إشارات نبضية. على عجلة التشفير الدوارة، يتم اكتشاف التغيرات المتناوبة في خطوط المجال المغناطيسي وتحويلها إلى إشارات نبضية.
بالمقارنة مع المشفرات البصرية التزايدية التقليدية، لا تتطلب المشفرات المغناطيسية التزايدية قرص شفرة ومصدر ضوء، وتحتوي على مكونات أقل، ولها هيكل كشف أبسط؛ وفي الوقت نفسه، فإن عنصر القاعة نفسه له أيضًا العديد من المزايا، مثل: الهيكل الصلب، والحجم الصغير، والوزن الخفيف، والعمر الطويل، ومقاومة الاهتزاز، وعدم الخوف من التلوث أو التآكل من الغبار، والزيت، وبخار الماء، ورذاذ الملح، وما إلى ذلك.
المشفر الدوار البصري التزايدي
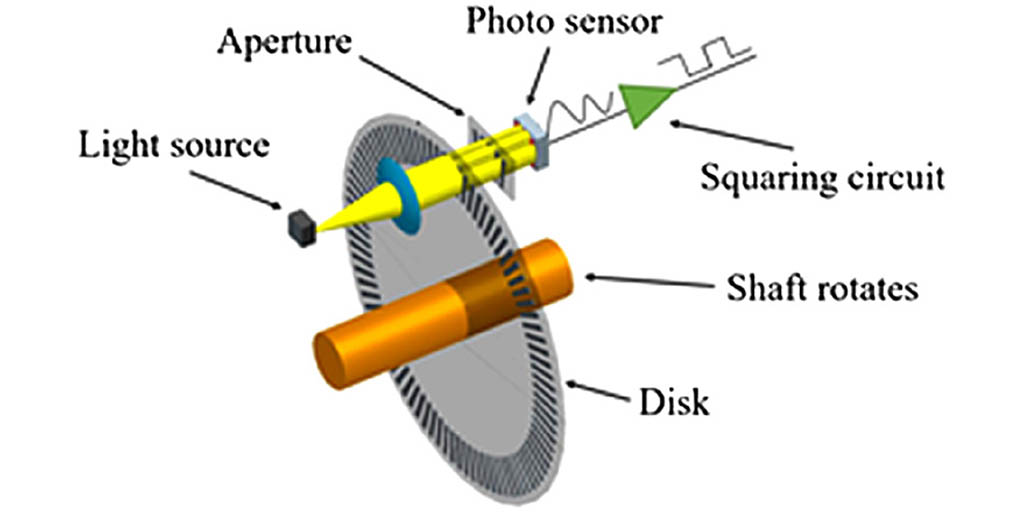
مُشفِّر تزايدي بصري: يستخدم هذا المشفر مبادئ بصرية لتوليد إشارات نبضية. يمر الضوء من خلال شبكة على عجلة تشفير دوّارة، مما يؤدي إلى إنشاء مناطق مضيئة ومظلمة متناوبة، وبالتالي توليد إشارة نبضية.
مشفر دوّار ميكانيكي تزايدي
مشفر تزايدي ميكانيكي: يستخدم جهاز التشفير التزايدي الميكانيكي التلامس الميكانيكي لتوليد إشارات نبضية. عندما يدور جسم أداة التشفير، تنزلق نقاط التلامس على الصفيحة الموصلة المعدنية، وبالتالي تولّد إشارة نبضية.
كود التشفير الدوار التزايدي الأردوينو
يوفر المشفر الدوّار التزايدي ABZ ثلاث قنوات: A وB وZ (المعروفة أيضًا باسم قناة المؤشر). تُستخدم القناتان A وB لتحديد الموضع والاتجاه، تمامًا كما هو الحال في أداة التشفير AB القياسية. توفر القناة Z نبضة واحدة لكل دورة وغالبًا ما تُستخدم لتحديد الموضع "الرئيسي" أو "صفر".
إليك مقتطف كود Arduino بسيط لقراءة مُشفِّر دوّار تزايدي ABZ:
// تحديد توصيلات دبوس التشفير والقيم الأولية
const int int encoderPinA = 2;
// متصل بمسمار القناة A على أداة التشفير
const int encoderPinB = 3;
// متصل بمسمار القناة B على أداة التشفير
const int int encoderPinZ = 4؛ // متصل بمسمار القناة Z على أداة التشفير (الفهرس)
متقلبة int int encoderPos = 0؛ // عداد الموضع
int LastReportedPos = 0؛ // آخر موضع تم الإبلاغ عنه
int aState;
int aLastState;
باطلة الإعداد() {
// إعداد الشاشة التسلسلية
يبدأ المسلسل(9600);
// تكوين دبابيس أداة التشفير كمدخلات
وضع الدبوس(pinMode(encoderPinA، INPUT_PULLUP);
وضع الدبوس(pinMode(encoderPinB، INPUT_PULLUP);
pinMode(encoderPinZ، INPUT_PULLUP);
// قراءة الحالة الأولية للمشفّرPinA
aLastState = قراءة رقمية(encoderPinA);
// إرفاق المقاطعات
attachInterrupt(digitalPinToInterrupt(encoderPinA)، readEncoder، CHANGE);
attachInterrupt(digitalPinToInterrupt(encoderPinZ)، resetEncoder، RISING);
}
حلقة باطلة() {
// تحقق مما إذا كان المركز قد تغير منذ آخر مرة تم الإبلاغ عنه
إذا (LastReportedPos != encoderPos) {
Serial.print("الموضع: ");
Serial.println(encoderPos);
آخر موضع تم الإبلاغ عنه = موضع التشفير;
}
}
// وظيفة المقاطعة لقراءة قناتي المشفر A و B
باطل readEncoder() { {
aState = DigitalRead(encoderPinA) ؛ // يقرأ الحالة "الحالية" لـ encoderPinA
// إذا كانت الحالة السابقة والحالة الحالية لـ encoderPinA مختلفة، فهذا يعني حدوث نبضة
إذا (aState != aLastState) {
// إذا كانت حالة القناة B مختلفة عن حالة القناة A، فهذا يعني أن المشفر يدور في اتجاه عقارب الساعة
إذا (digitalRead(encoderPinB) != aState) {
ترميز الموضع ++;
} وإلا {
التشفيرPos-;
}
Serial.print("الموضع = ");
Serial.println(encoderPos);
}
aLastState = aState؛ // تحديث الحالة السابقة للمشفّر بالحالة الحالية
}
// دالة المقاطعة لقراءة قناة المشفر Z (الفهرس)
باطلة إعادة تعيين المبرمج() { {
أداة التشفيرPos = 0؛ // إعادة تعيين موضع أداة التشفير إلى صفر
Serial.println("تم اكتشاف الفهرس، إعادة تعيين الموضع إلى الصفر");
}
كيفية استخدام كود الأردوينو هذا
- وصِّل القنوات A، وB، وZ من المشفر الدوَّار التزايدي ABZ بالمسامير 2، و3، و4 على Arduino، على التوالي.
- قم بتحميل الكود إلى Arduino الخاص بك.
- افتح الشاشة التسلسلية لعرض موضع أداة التشفير وإعادة تعيين المؤشر
المشفر الدوار التزايدي مقابل المشفر الدوار المطلق
هناك 14 اختلافاً بين المشفر الدوار التزايدي والمطلق، والجداول أدناه توضح جميع الاختلافات بينهما:
تطبيقات أجهزة التشفير التزايدي
خطوط الإنتاج الآلية: في خطوط الإنتاج المؤتمتة، تُستخدم أجهزة التشفير التزايدي لقياس موضع الماكينات والتحكم فيه. على سبيل المثال، على خط التجميع، يمكن لأجهزة التشفير التحكم بدقة في موضع المكونات لضمان التجميع الصحيح.
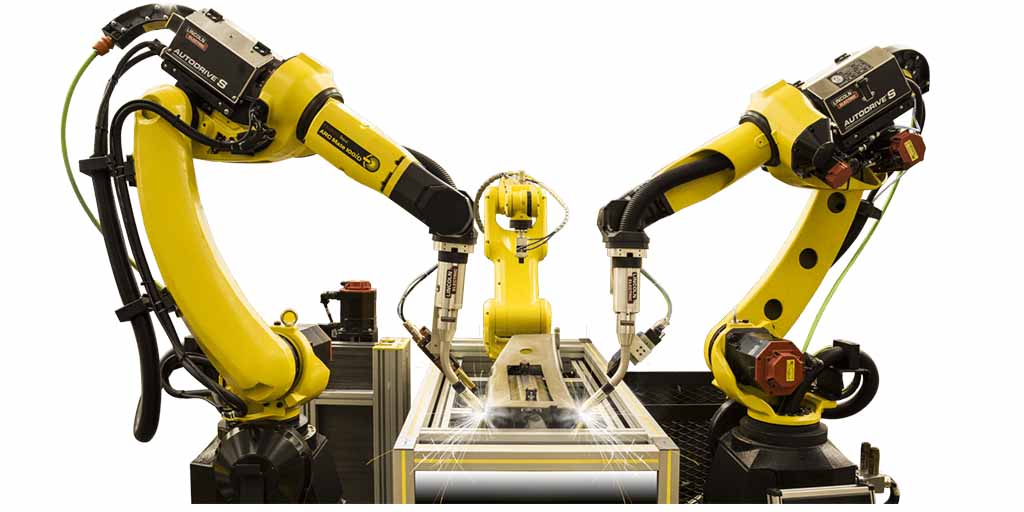
الروبوتات: تلعب أجهزة التشفير التزايدي دورًا مهمًا في مجال الروبوتات، حيث توفر تغذية راجعة دقيقة للحركة بحيث يمكن للروبوتات التحكم في حركاتها بدقة.
التحكم في المحرك المؤازر: تتطلب المحركات المؤازرة تغذية راجعة دقيقة للموضع للتحكم الدقيق. تعد أجهزة التشفير التزايدي مكونًا رئيسيًا في توفير هذه التغذية المرتدة,
الخاتمة
تعد أجهزة التشفير التزايدي جزءًا مهمًا من التطبيقات الصناعية والأتمتة الحديثة. من خلال الفهم المتعمق لمبادئ المشفرات التزايدية وأنواعها وتطبيقاتها، يمكننا أن نفهم بشكل أفضل دورها المهم في سيناريوهات الأتمتة الصناعية المختلفة. على الرغم من وجود بعض التحديات، إلا أنه مع التقدم المستمر للتكنولوجيا، لدينا سبب للاعتقاد بأن أجهزة التشفير التزايدي ستلعب دورًا أكبر في المستقبل وستعزز التقدم في مجال الأتمتة الصناعية. نأمل أن تكون هذه المقالة قد ساعدتك في اكتساب فهم أعمق لأجهزة التشفير التزايدي وأثارت اهتمامك بهذه التقنية المهمة.