Lorsque vous choisissez le composant de contrôle clé (ou "cerveau de contrôle") de votre système de contrôle industriel, par exemple le contrôle de la température constante, vous avez deux options : Contrôleurs PID et les automates.
Qu'est-ce que ces deux produits ? Quelle est la différence entre eux ? Et lequel devriez-vous utiliser ?
Dans cet article, nous vous fournirons des informations plus approfondies que toutes celles que vous avez lues jusqu'à présent.
C'est parti !
Qu'est-ce qu'un contrôleur PID ?
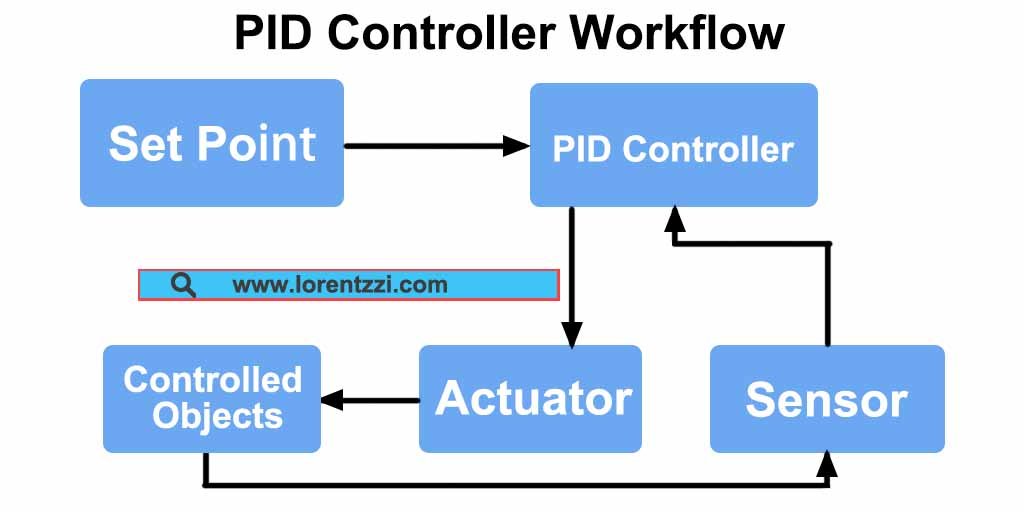
Un contrôleur PID est conçu pour maintenir un point de consigne (valeur souhaitée) dans un système en ajustant sa sortie en fonction de trois paramètres : proportionnel, intégral et dérivé.
Une boucle de contrôle PID se compose de trois éléments principaux : l'objet contrôlé (par exemple, un élément chauffant), un système de contrôle de la température et un système de contrôle de l'humidité. capteur qui fournit un retour d'information en temps réel, et le contrôleur PID lui-même. Le contrôleur compare en permanence la valeur mesurée avec le point de consigne et ajuste la sortie en conséquence afin de minimiser l'erreur.
En réglant ces trois paramètres de manière appropriée, il est possible d'obtenir un contrôle stable et précis du système.
Les régulateurs PID sont largement utilisés dans les applications impliquant le contrôle de la température, du débit et de la pression.
Qu'est-ce qu'un automate ?
Nous allons maintenant nous familiariser avec les automates programmables.
PLC est l'abréviation de Programmable Logic Controller (contrôleur logique programmable). Il est couramment utilisé pour gérer des tâches complexes, non seulement le contrôle PID, mais aussi le contrôle séquentiel, le contrôle de distance, le contrôle de proximité, le contrôle de comptage, etc.
Entrées et sorties PLC peuvent être de différents types : discrets (marche/arrêt), analogiques (tension ou courant continu), capteurs de température, encodeurset même des paquets de données série ou Ethernet.
Cette flexibilité permet à un seul automate de remplacer des centaines de relais câblés, de temporisateurs et de compteurs, tout en restant dans un boîtier compact pouvant être monté sur rail DIN.
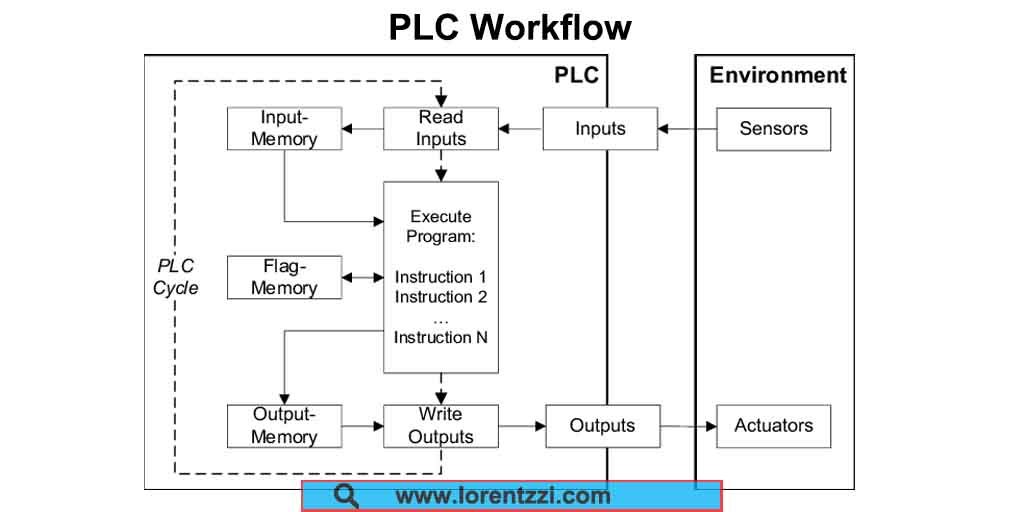
Le processus de fonctionnement de l'automate peut être divisé en trois étapes : analyse des entrées, exécution des programmes et mise à jour des sorties.
Ainsi, son processus de fonctionnement montre que l'automate fonctionne également selon une logique de contrôle en boucle fermée.
Quelles sont les différences entre un contrôleur PID et un automate ?
Les principales différences entre le contrôleur PID et l'automate programmable résident dans huit aspects : l'objectif, le traitement du signal, la méthode de contrôle, la vitesse, l'application, le coût, la programmabilité et la facilité d'utilisation.
Dans le tableau suivant, nous allons comparer ces 8 aspects en détail :
| Objet | Contrôleur PID | PLC |
|---|---|---|
|
Objectif |
Utilisé pour traiter des tâches simples, telles que le contrôle d'une température constante, d'une pression constante, d'un débit constant, etc. |
Utilisé pour traiter non seulement des tâches simples mais aussi des séquences complexes ou des tâches de contrôle de processus, par exemple : contrôle du remplissage de l'eau en bouteille, son processus est le suivant : bouteille vide → remplissage → capsulage → étiquetage → mise en boîte. |
|
Traitement des signaux |
Un contrôleur PID n'accepte que des signaux analogiques continus - généralement des thermocouples, des RTD, des signaux 4-20 mA ou 0-10 V provenant de transmetteurs de température, de pression ou de débit. |
Un automate programmable, en revanche, gère à la fois ces signaux analogiques et les entrées discrètes (marche/arrêt) telles que les boutons-poussoirs, les capteurs de proximité et les interrupteurs de fin de course ; avec le module approprié, il peut également lire des trains d'impulsions à grande vitesse provenant de codeurs rotatifs incrémentaux. |
|
Méthode de contrôle |
Retour d'information continu basé sur le temps (le pourcentage de sortie est recalculé à chaque balayage pour minimiser l'erreur) |
Machine à base d'événements ou d'états, par exemple : Si le capteur A est valide et que le capteur B est invalide, le moteur démarre. |
|
Vitesse |
100 millisecondes à 500 millisecondes. |
De quelques millisecondes à quelques centaines de millisecondes, optimisé pour les E/S lourdes. |
|
Application |
Four à température constante/four tunnel, pompe à eau, alimentation en eau à pression constante, extrudeuse autonome. |
Lignes de remplissage/emballage, lignes de robots/convoyeurs, contrôle de groupes de chaudières multizones. |
|
Coût |
Les contrôleurs PID sont peu coûteux et coûtent généralement moins de $100. |
Les automates coûtent généralement moins cher que le $1000 en raison de leur flexibilité programmable, de leur polyvalence et de leur capacité à gérer des tâches complexes. |
|
Programmabilité |
Les régulateurs PID n'offrent qu'une programmation au niveau des paramètres - points de consigne, gains PID, limites de sortie, seuils d'alarme, etc. Les régulateurs PID programmables, tels que les régulateurs de température PID à rampe et à immersion, permettent aux utilisateurs de stocker des profils de points de consigne à plusieurs étapes, mais la stratégie de contrôle reste un algorithme à boucle fermée unique ; une fonction de réglage automatique optionnelle calcule les valeurs PID optimales pour cette boucle fermée. |
L'automate prend entièrement en charge la programmation par l'utilisateur : la logique en échelle, les blocs fonctionnels ou le texte structuré définissent des séquences complètes de la machine, ce qui lui permet d'analyser des centaines de points d'E/S et d'exécuter plusieurs sous-programmes en une seule fois. |
|
Facilité d'utilisation |
Oui, très pratique à utiliser, aucune connaissance en programmation n'est requise pour commencer. |
Des connaissances en programmation sont nécessaires, ce qui rend le démarrage relativement difficile pour les débutants. |
Lequel utiliser ?
La comparaison ci-dessus entre les régulateurs PID et les automates programmables démontre clairement leurs différences essentielles, mais lequel dois-je choisir en fin de compte ?
En bref :
Si vous avez besoin d'un contrôle séquentiel, d'un contrôle d'interverrouillage ou d'un contrôle d'E/S multipoint, vous devriez choisir un API en raison de sa flexibilité programmable.
Si vous avez besoin d'un contrôle en boucle unique, d'un contrôle continu ou d'un contrôle à valeur constante, un contrôleur PID est le meilleur choix. Les contrôleurs PID sont peu coûteux, relativement stables et ne nécessitent aucune expérience en matière de programmation.




Conclusion
En conclusion, les contrôleurs PID sont mieux adaptés aux scénarios de contrôle simples en raison de leur facilité d'utilisation. Les automates programmables, en revanche, sont plus puissants et peuvent effectuer non seulement des contrôles PID simples, mais aussi des contrôles séquentiels et d'autres applications.
Si vous êtes à la recherche d'un contrôleur PID facile à utiliser en provenance de Chine, Lorentzzi® offre des options de haute qualité à des prix compétitifs.

Lorentzzi® est spécialisée dans la fourniture de contrôleurs PID de haute qualité, de relais à semi-conducteurs, de contacteurs CA, de capteurs de proximité et de codeurs rotatifs incrémentaux.
Contactez nous dès aujourd'hui pour personnaliser votre solution de contrôle industriel ou obtenir les derniers tarifs !