Il existe trois différences entre un capteur de proximité blindé(également connu sous le nom de capteur de rinçage) et capteur de proximité non blindé(également appelé capteur de proximité non affleurant), de quoi s'agit-il ? Examinons-les dans les parties suivantes de cet article.

Différence de longueur de la tête du capteur PBT
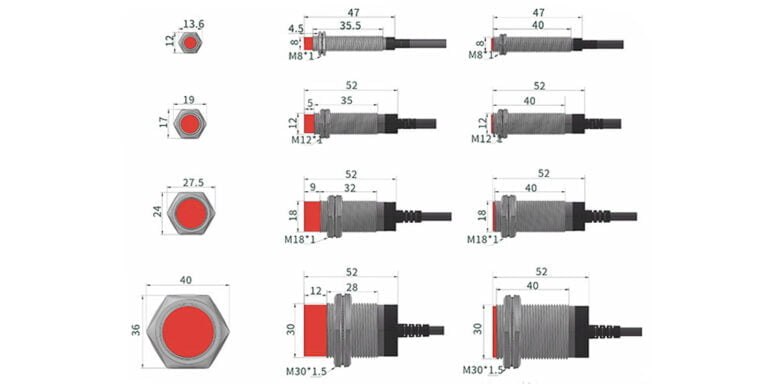
Un matériau de tête de capteur de proximité est PBT (polybutylène téréphtalate). Le matériau PBT présente de nombreux avantages, tels qu'une résistance élevée, l'ininflammabilité, etc. La tête PBT de notre capteurs de proximité est de couleur bleue, certains fabricants de capteurs de proximité peuvent utiliser orange(Autonics) ou vert (Pepperl+Fuchs). Lorsque l'on assemble un capteur de proximité blindé et un capteur de proximité non blindé du même modèle, on peut clairement voir que la tête du capteur de proximité non blindé est plus longue que celle du capteur blindé. En général, la différence de longueur de la tête est de 4,5 à 12 mm.
Différence de distance de détection entre un capteur de proximité blindé et non blindé
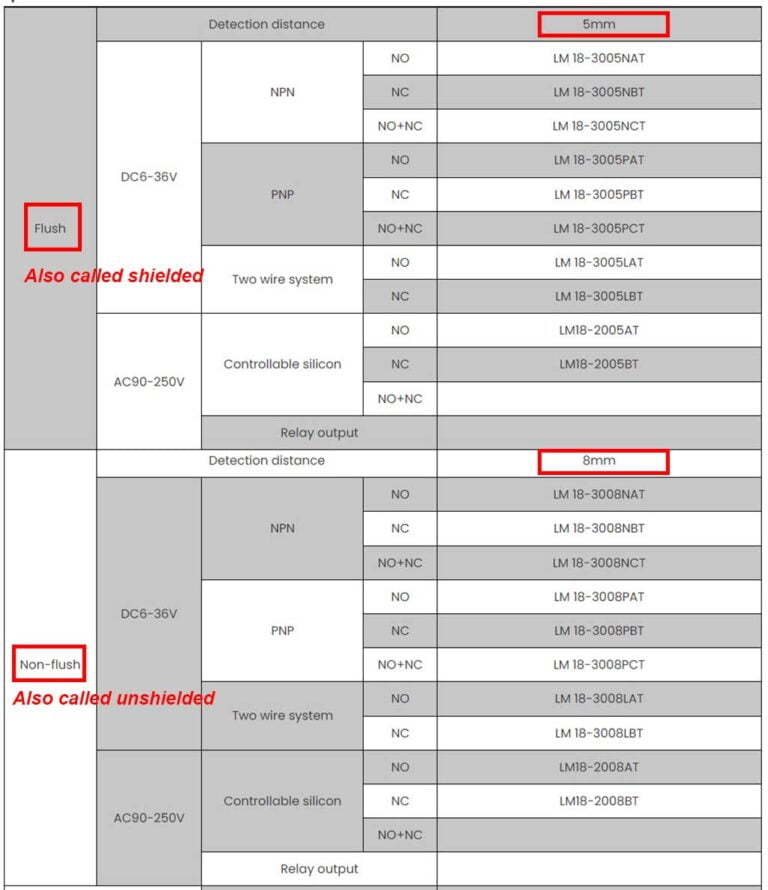
Du point de vue de la distance de détection, la distance de détection du capteur de proximité non blindé est plus longue que celle du capteur blindé.
Par exemple, un Détecteur de proximité inductif M18 en laiton nickelé n'est que de 0 à 5 mm. Alors que la même distance de détection pour un câble non blindé sera de 0 à 8,0 mm. Pourquoi ? Comme la tête de capteur non blindée est hors de son boîtier, son champ magnétique est plus grand et plus fort.
Ainsi, lorsqu'un objet métallique s'approche, il peut le détecter à une grande distance. Comme la tête d'un capteur à bouclier est enfouie dans le boîtier, son champ magnétique est faiblement bloqué par le boîtier.
Ressources sur https://lorentzzi.com/products/proximity-sensor/inductive-proximity-sensor/lm18-18mm-diameter-inductive-proximity-sensor/
Méthodes d'installation différence entre un capteur de proximité blindé et non blindé
La méthode d'installation diffère entre les deux types de capteurs.
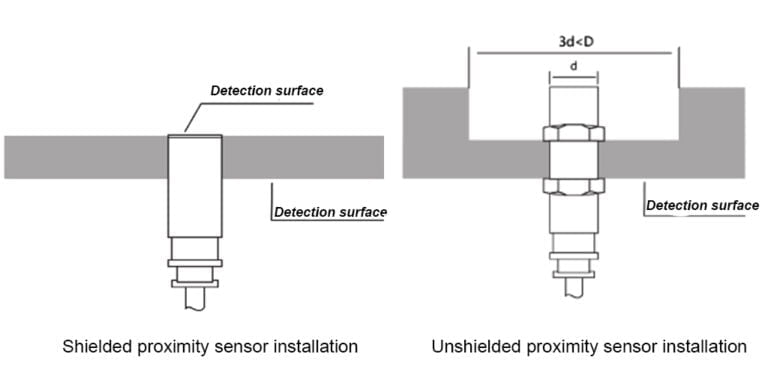
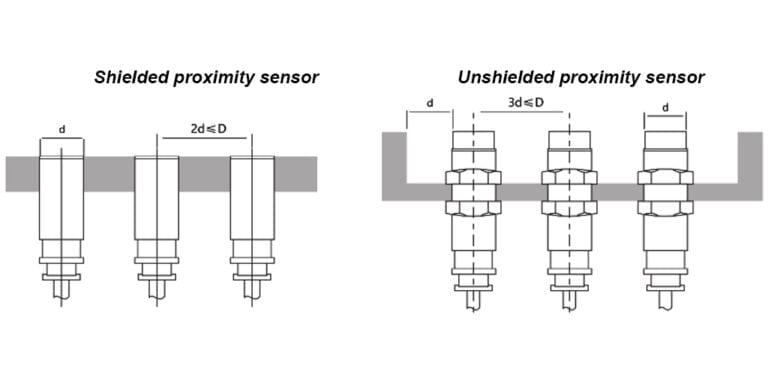
Lors de l'installation d'un capteur de proximité blindé, la surface de détection du capteur peut être affleurante à la surface d'installation. Comme indiqué précédemment, l'émission du champ magnétique est limitée à la tête du cylindre, aucun champ magnétique n'étant généré sur le côté du cylindre. Cette méthode d'installation offre l'avantage d'éviter les dommages causés par les collisions avec l'objet détecté.
Pour les capteurs de proximité non blindés, la tête du capteur doit être exposée au-delà de la surface d'installation, car son côté peut également émettre un champ magnétique. Il est essentiel d'assurer la réussite du circuit par le champ magnétique dans cette zone. Bien que ce capteur offre une plus grande distance de détection que le capteur de proximité blindé, il risque d'être endommagé par le champ magnétique de l'objet. inertie lorsqu'il s'approche du capteur.
Conseils pour l'installation de plus de deux capteurs de proximité
En outre, il est important de tenir compte du fait que lors de l'installation de plusieurs capteurs de proximité côte à côte, il convient de respecter un espacement suffisant pour éviter les interférences mutuelles entre les capteurs et éviter que interférence magnétique.
Dans le cas des capteurs de proximité blindés, l'espacement doit être égal ou supérieur à deux fois leur diamètre.
Pour les capteurs de proximité non blindés, la distance entre deux capteurs doit être égale ou supérieure à trois fois leur diamètre. Les détecteurs de proximité inductifs ne peuvent détecter que des substances métalliques,
Conclusion
Voici les 3 différences entre un capteur de proximité blindé et non blindé. En connaissant ces différences, nous pouvons maintenant choisir le bon capteur de proximité. Si vous avez encore des questions, laissez-nous un commentaire ci-dessous, nous vous fournirons une réponse professionnelle dans les 24 heures.